-
여객기를 제품


긴 범위 자기 안테나 30Dbi 무료 채널 Uhf Vhf 휴대용 360도 신호 증폭기 HDTV 실내 디지털 Tv 안테나

지역 채널을 위한 최고의 tv 안테나 hd 무료 무제한 안테나 hdfreeunlimited uhf vhf 디지털 tv 안테나

공장 가격 무료 샘플 디지털 Tv 안테나 스마트 Tv 4K Mini 직사각형 조합 안테나용 디지털 안테나

Gnss Rtk 자동차 안테나를 가진 OEM ODM 고정밀 농업 GPS 수신기 Glonass BDS G-Mouse

Toxu 3 밴드 신호 부스터 리피터 900 1800 2100 mhz 모바일 네트워크 부스터 gsm 3g 4g gsm 신호 부스터

차량 IoT 용 SMA 커넥터를 탑재한 맞춤형 1.5M/3M 3-in-1 GPS GNSS + 4G/3G + WiFi 블루투스 자동차 콤보 안테나

5-in-1 Combo GNSS GPS 4G 3G 2G WiFi MIMO 버섯 안테나 자동차 차량 내비게이션 IoT 안테나

범용 상어 지느러미 콤보 차량 안테나 GPS GNSS 자동차 안테나

다기능 상어 지느러미 콤보 자동차 안테나 AM/FM 4G GPS GNSS

고정밀 GPS 타이밍 신호를 가진 기지국 및 해양 항해를 위한 방수 GNSS 타이밍 안테나

고정밀 L1/L5 멀티 밴드 RTK GNSS 안테나 지원 GPS, GLONASS, Galileo, 항공용 Beidou

UAV 드론 L1 L2 L5주파수를 위한 다성급 마이크로 측정 4 팔 헬리컬 헬릭스 안테나 다주파수 GNSS & GPS RTK
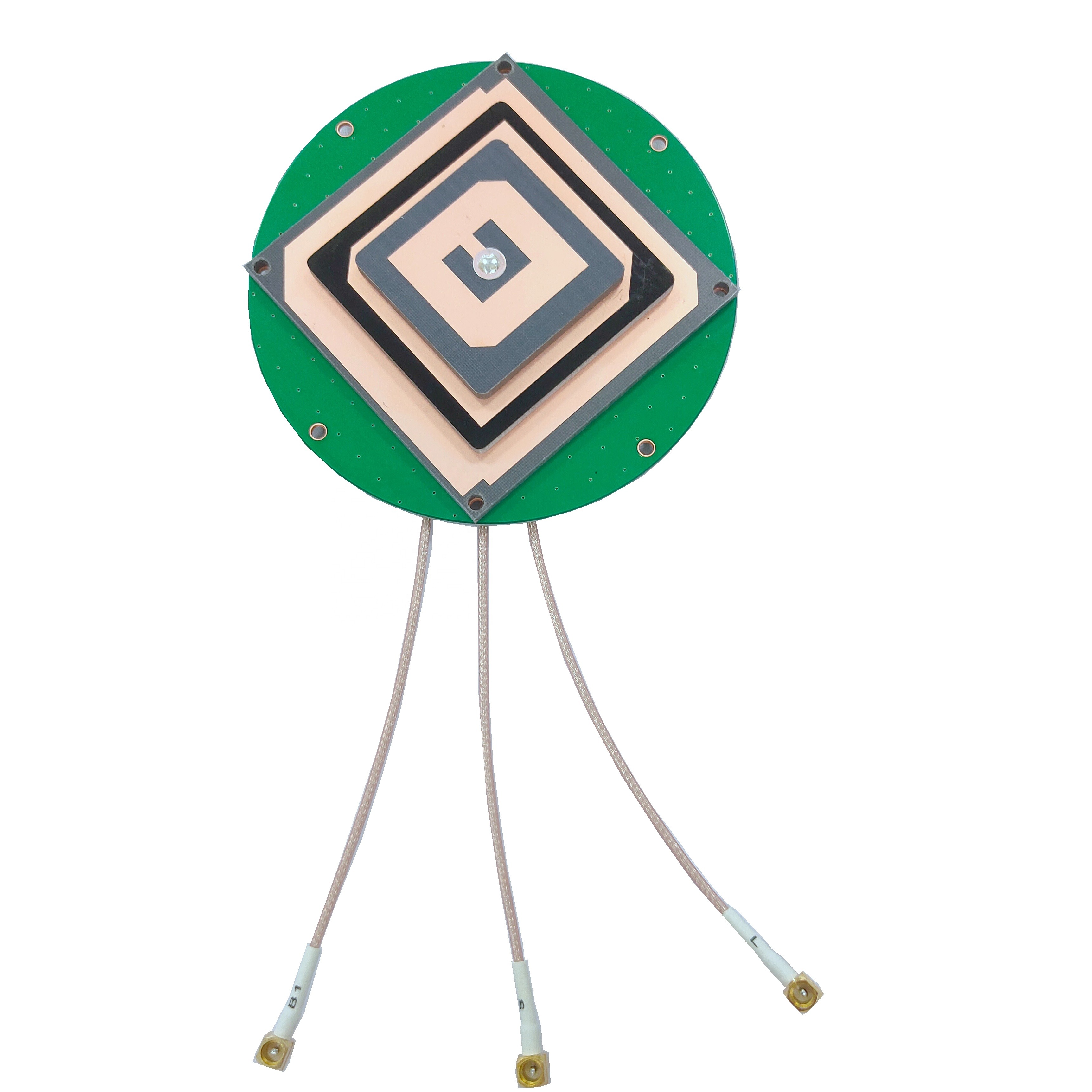
측량 및 항법을 위한 RTK GNSS 안테나 고정밀 능동 GPS 패치 안테나를 내장했습니다

RTK 해양 사용을 위한 고정밀 다주파수 GNSS RTK 해양 항법 안테나 항해 GPS GNSS 해양 안테나

해양 항해 및 기지국 위치를 위한 IP67 방수 기능을 갖춘 GNSS 타이밍 안테나

재고 15154 Mm 세라믹 패치 Gps Glonass 안테나, 구축에서 도매-Gps Gnss 세라믹 안테나

미니 Fakra 여성 LVDS 4 핀 GPS fakra-z 여성 자동차 안테나 어댑터 케이블 RF 응용 프로그램 케이블 통신 케이블

Fakra D 남성 플러그와 1.37mm 에 대한 미니 케이블 구리 Pigtail 점퍼 U.FL U.FL 용 15cm RF 케이블 어셈블리

Rg178 Rg316 Rf 점퍼 안테나 케이블 Sma 동축 케이블 어셈블리

Omni 지향성 듀얼 Dand 50 Km 장거리 외부 부스터 장치 Mimo 야외 라우터 Lte 5ghz 2g Gsm Wifi 패널 5g 4g 안테나

옥외 4*4 MIMO Omni 지향성 섬유 유리 안테나 5G NR 셀룰러 Sub-6 GHz 이중 극성 안테나

고이득 외부 868 915MHz 유연한 고무 채찍 워키토키 안테나 VHF UHF SMA 통신 안테나

무료 샘플 사용자 정의 180mm RF 1.13 피그테일 케이블 IPX 동축 통신 케이블은 RF 피그테일 케이블을 엽니다
RF 커넥터
RF 케이블 어셈블리
내장 된 안테나
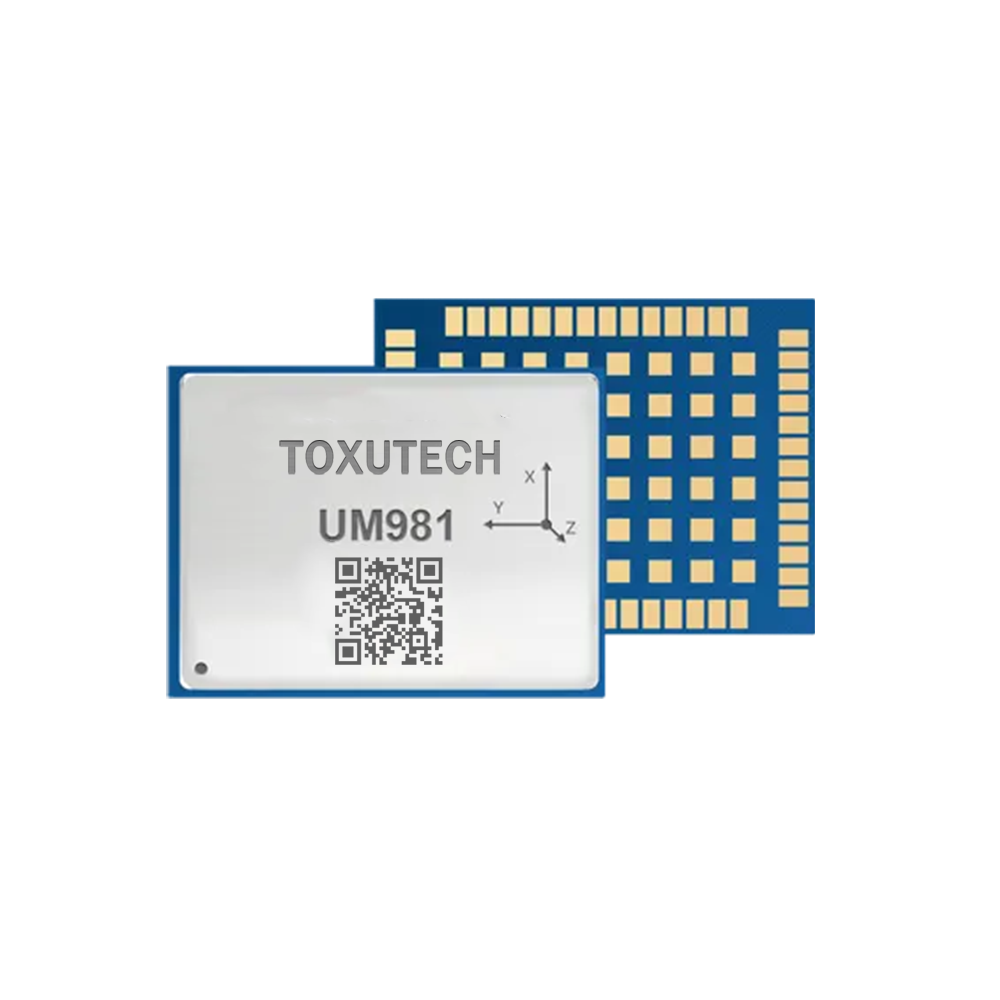
위치추적 칩 및 모듈
-
-
-




































 언어
언어
 영어
영어 중국
중국 한국어
한국어
 홈 >
홈 >